
MyzharBot v1
The first version of MyzharBot was built in 2012 using a simple chassis made of laser-cut plastic sheets joint together with nuts and bolts.
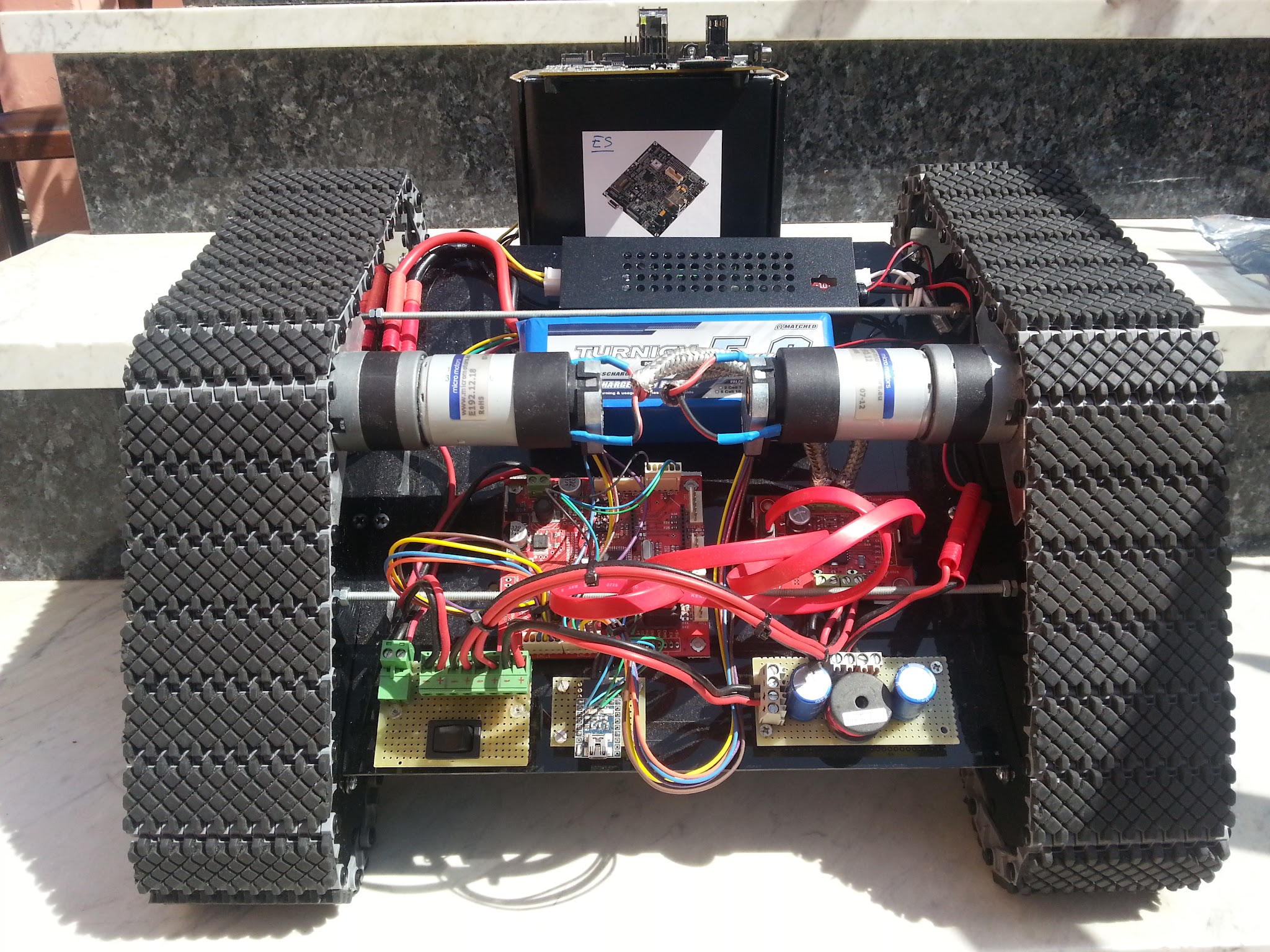
Electronics
The electronics was very simple, allowing to control only the movement of the robot with no automation capabilities.
It was powered by a custom made motor driver board allowing it to move using simple serial commands on Modbus protocol.
The tracks were driven by the same Micromotors e192-12-18 that I continue to use today.
Feedback on speed and position was provided by the AMT102-V Quadrature Encoder connected to the motor shafts, the same used in the latest versions of MyzharBot.
Software
To control it I designed a simple Qt-based GUI application that allowed me to send movement commands and monitor the encoder feedback.
ROS was not yet used at that time; I heard about it but I wrongly thought that making everything from scratch would have been easier and faster.
I was a young and naive engineer…
Videos
A few videos of my first tests in 2012: