Welcome to my personal lab space!
I’m Walter ‘Myzhar’ Lucetti, a Computer Engineer who loves robotics.
This is where my robots come alive. It’s a place fueled by code, sensors, and my endless curiosity about machines that can see and think for themselves. Here, you’ll find my hands-on tutorials, in-depth guides, and honest stories from my projects. I dive into everything from ROS 2 and stereo vision to NVIDIA® Jetson, CUDA, 3D printing, and AI… always keeping things grounded in real hardware and the actual problems I’m trying to solve.
Latest News
New ROS 2 Tutorial: Quality of Service (QoS)
A new in-depth tutorial on ROS 2 Quality of Service: why two healthy nodes refuse to talk, every QoS policy explained, publisher/subscriber compatibility tab...
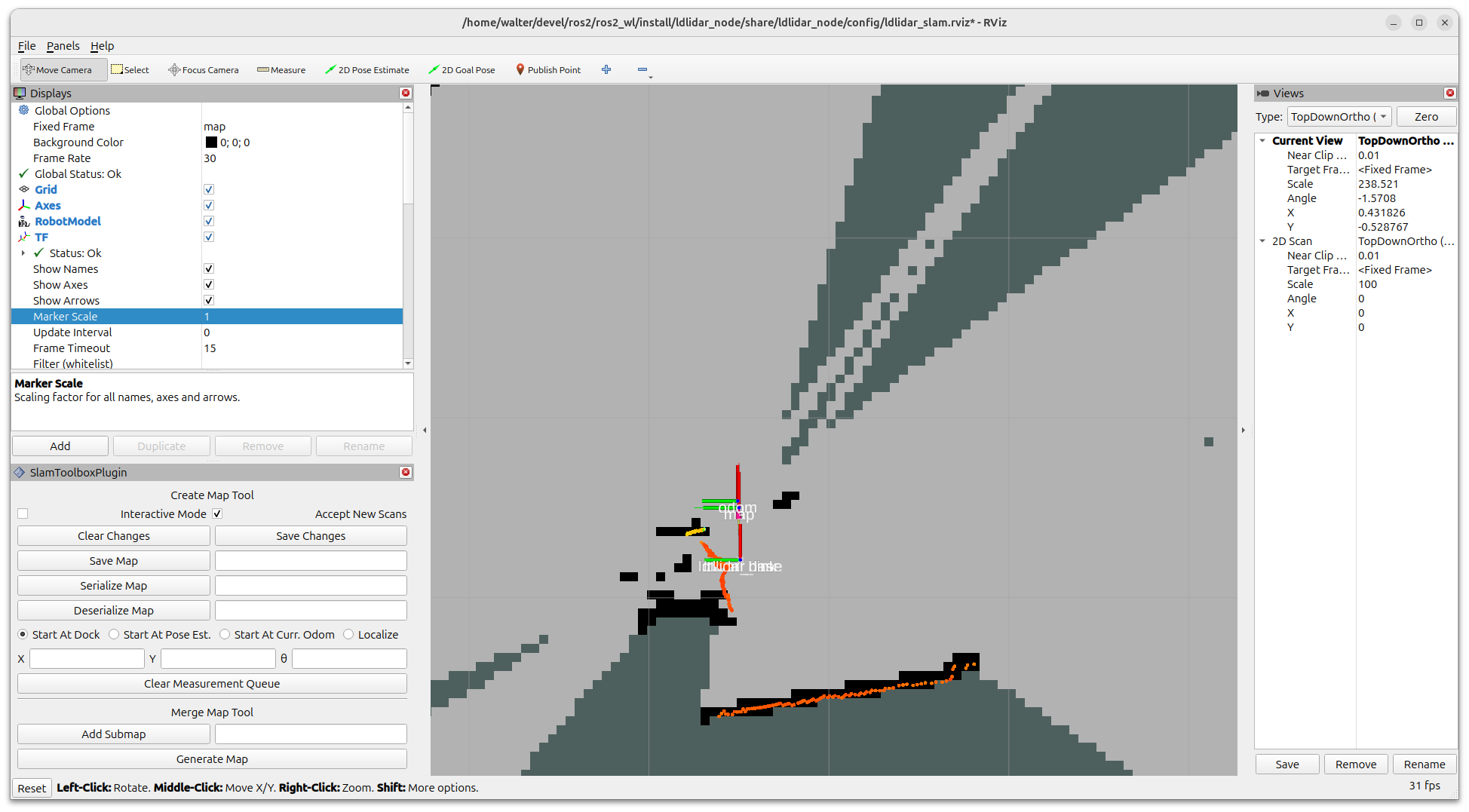
YALIO: Yet Another Lidar ICP Odometry
A new side project is born: YALIO, a ROS 2 package that turns cheap 2D lidars like the LDRobot LD19/LD06 into a reliable odometry source using Point-to-Line ...

OpenCV 5 is Finally Here!
After years of development, OpenCV 5 officially launched at CVPR 2026. A complete DNN engine rewrite, native LLM/VLM support, FP16/BF16 types, HAL hardware a...
New ROS 2 Tutorial: Lifecycle (Managed) Nodes
A new in-depth tutorial covering the ROS 2 lifecycle state machine, all states and transitions, C++ implementation, Nav2 Lifecycle Manager, and real hardware...
Test Your Knowledge - A New Section in the ROS 2 Tutorials
All ROS 2 tutorials now include a ‘Test Your Knowledge’ section with multiple-choice questions so you can verify how well you’ve understood the material.

ROS 2 Lyrical Luth is Here!
The twelfth ROS 2 release lands today. A new LTS distribution built on Ubuntu 26.04, packed with performance gains, async Python support, zero-copy GPU trans...

Projects
MyzharBot and other robotics, computer vision, and AI projects. From concept to hardware.

Tutorials
Deep‑dive guides on ROS 2, stereo vision, NVIDIA Jetson, CUDA, 3D printing, and more.
