New ROS 2 Tutorial: Quality of Service (QoS)
A new in-depth tutorial on ROS 2 Quality of Service: why two healthy nodes refuse to talk, every QoS policy explained, publisher/subscriber compatibility tab...

A new in-depth tutorial on ROS 2 Quality of Service: why two healthy nodes refuse to talk, every QoS policy explained, publisher/subscriber compatibility tab...
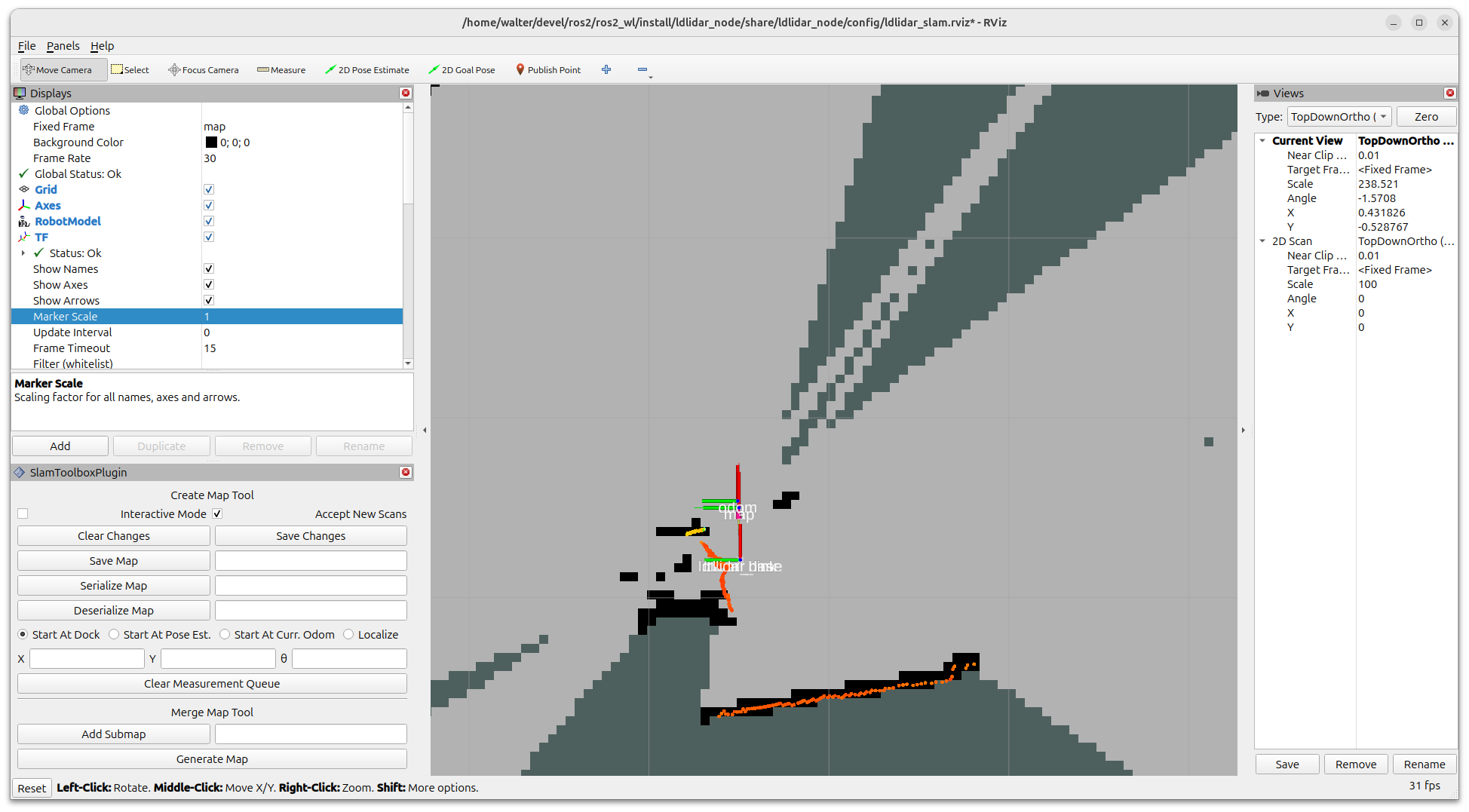
A new side project is born: YALIO, a ROS 2 package that turns cheap 2D lidars like the LDRobot LD19/LD06 into a reliable odometry source using Point-to-Line ...
After years of development, OpenCV 5 officially launched at CVPR 2026. A complete DNN engine rewrite, native LLM/VLM support, FP16/BF16 types, HAL hardware a...
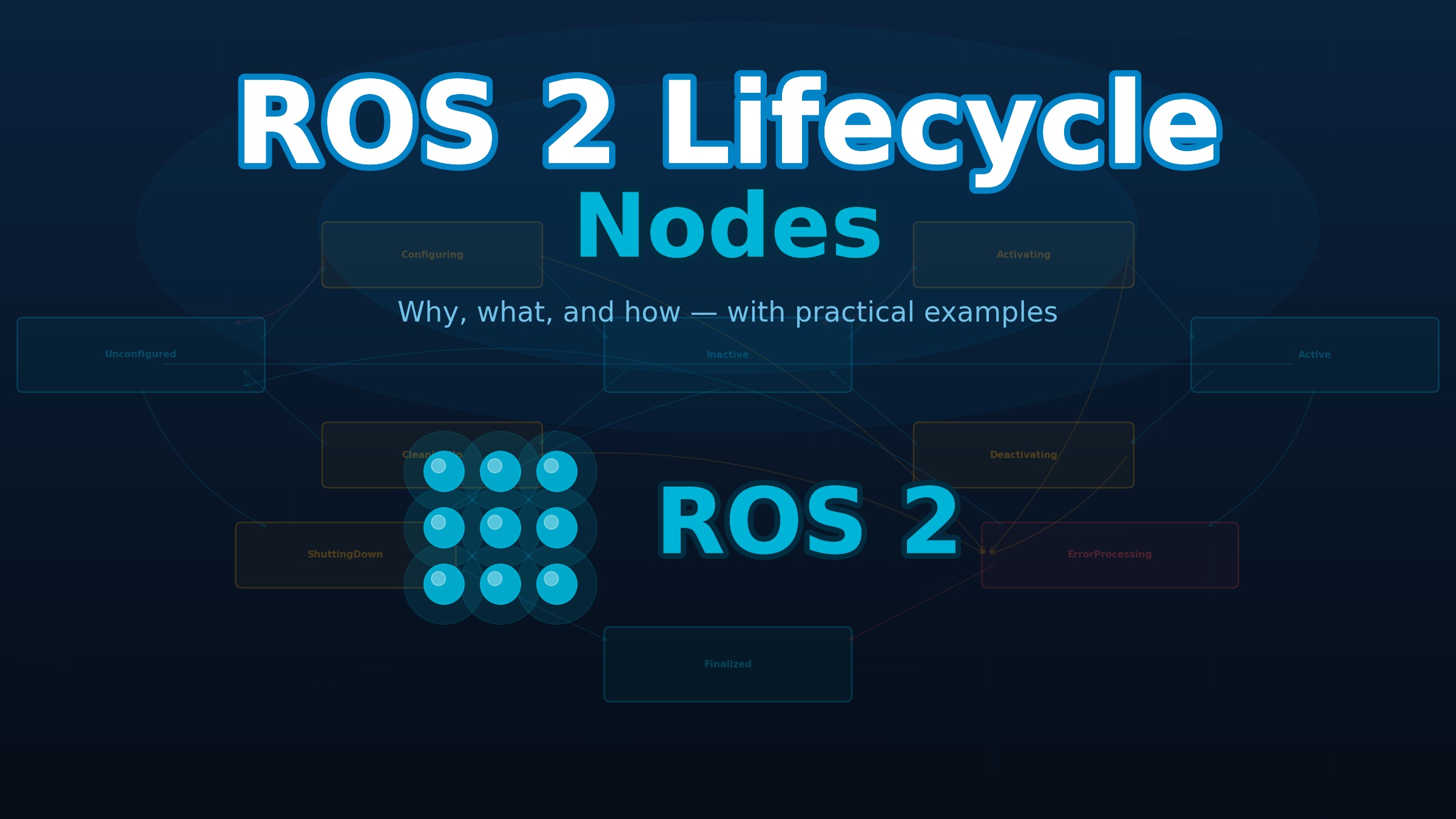
A new in-depth tutorial covering the ROS 2 lifecycle state machine, all states and transitions, C++ implementation, Nav2 Lifecycle Manager, and real hardware...
All ROS 2 tutorials now include a ‘Test Your Knowledge’ section with multiple-choice questions so you can verify how well you’ve understood the material.
The twelfth ROS 2 release lands today. A new LTS distribution built on Ubuntu 26.04, packed with performance gains, async Python support, zero-copy GPU trans...
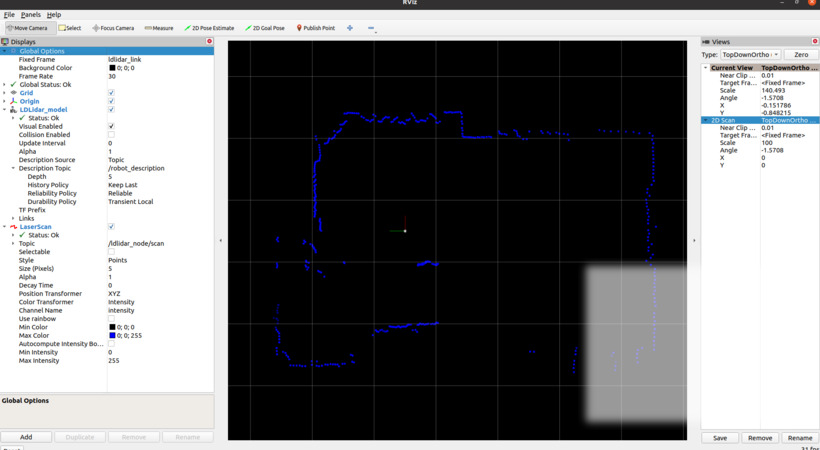
A new section of the website dedicated to open source ROS 2 packages — starting with the LD Lidar ROS 2 Driver for LDRobot LD19/LD06 sensors.
Two new tutorials covering ROS 2 Python Launch files and Node Composition with IPC and zero-copy communication.
New tutorial: understand how ROS 2 node names and namespaces work, learn to rename and remap nodes at launch, and follow best practices for multi-robot syste...
I released a new tutorial on configuring ROS 2 nodes.
I released a new tutorial on understanding the ROS 2 communication middleware.
My life has taken an exciting turn as the Company I work for, Stereolabs, has been acquired by Ouster.
I released a new tutorial on starting ROS 2 nodes using both the command line and Python launch files.
I released the first tutorials on ROS 2, covering installation and basic concepts.
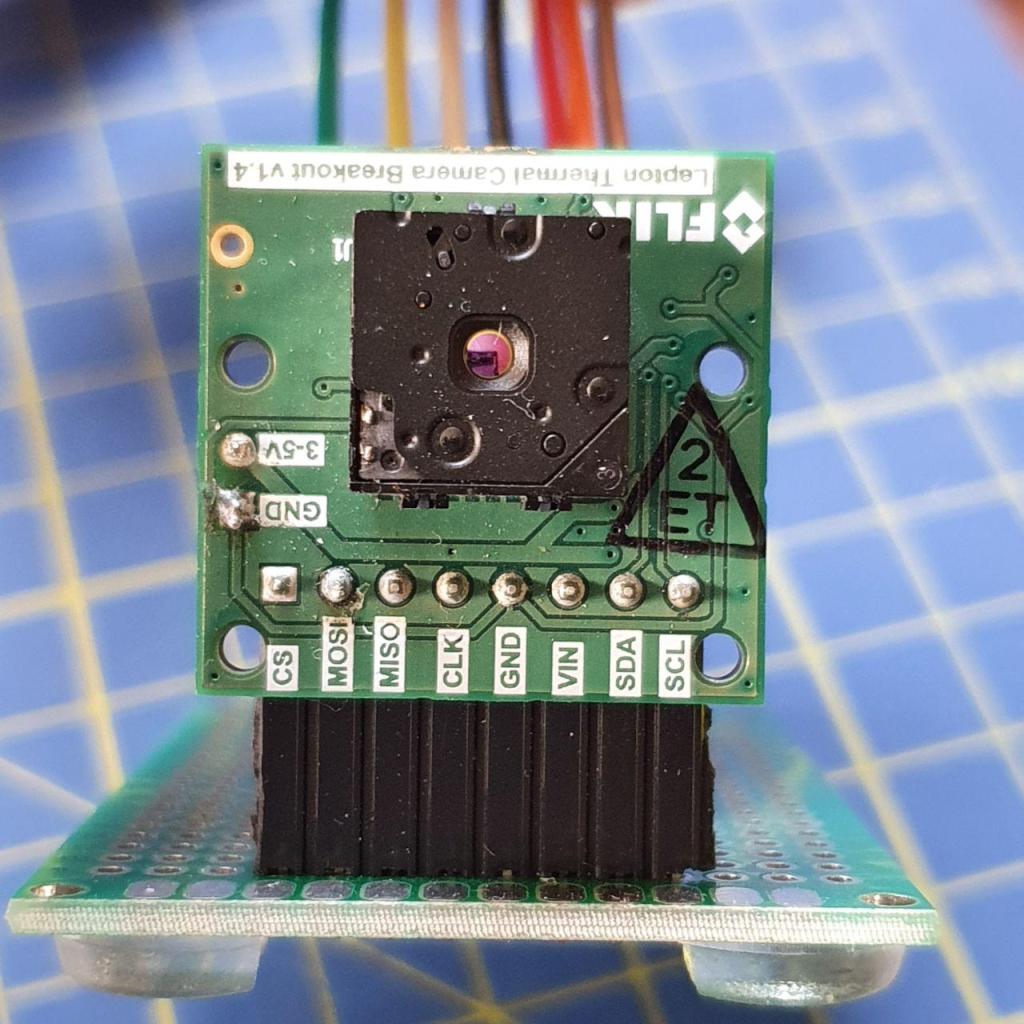
I restored the tutorial on using the FLIR Lepton3 thermal camera with NVIDIA® Jetson™ devices.
The website has been updated with new project pages and a CUDA™ Compute Capability tutorial.
After many years with WordPress, I’m moving to a simpler solution: GitHub Pages with Jekyll.