Introducing the ROS 2 Projects Section
Alongside the tutorials section, I’ve been working on a dedicated space for the open source ROS 2 packages I’ve built over the years. Today I’m launching the ROS 2 Projects section of the website.
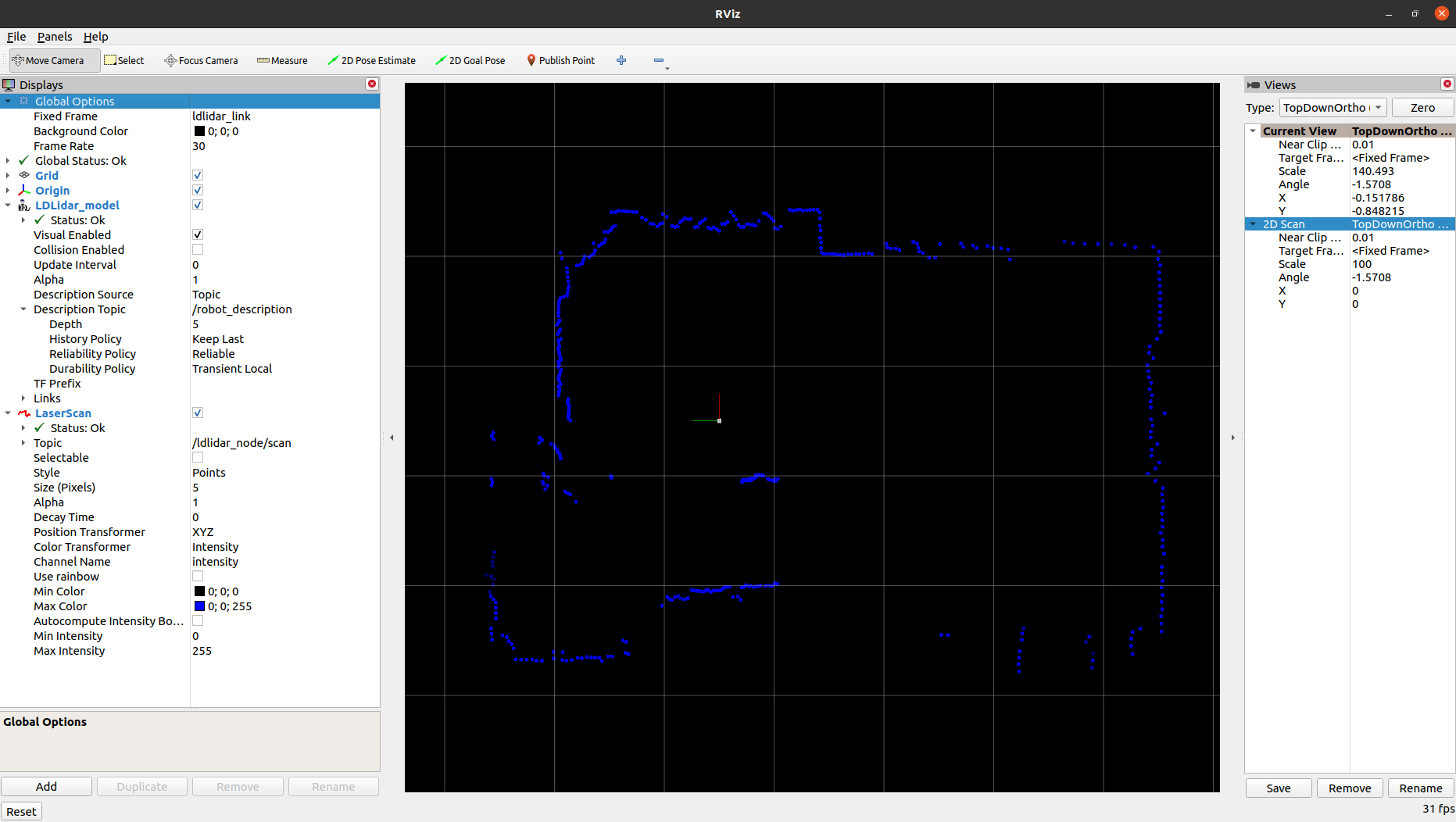
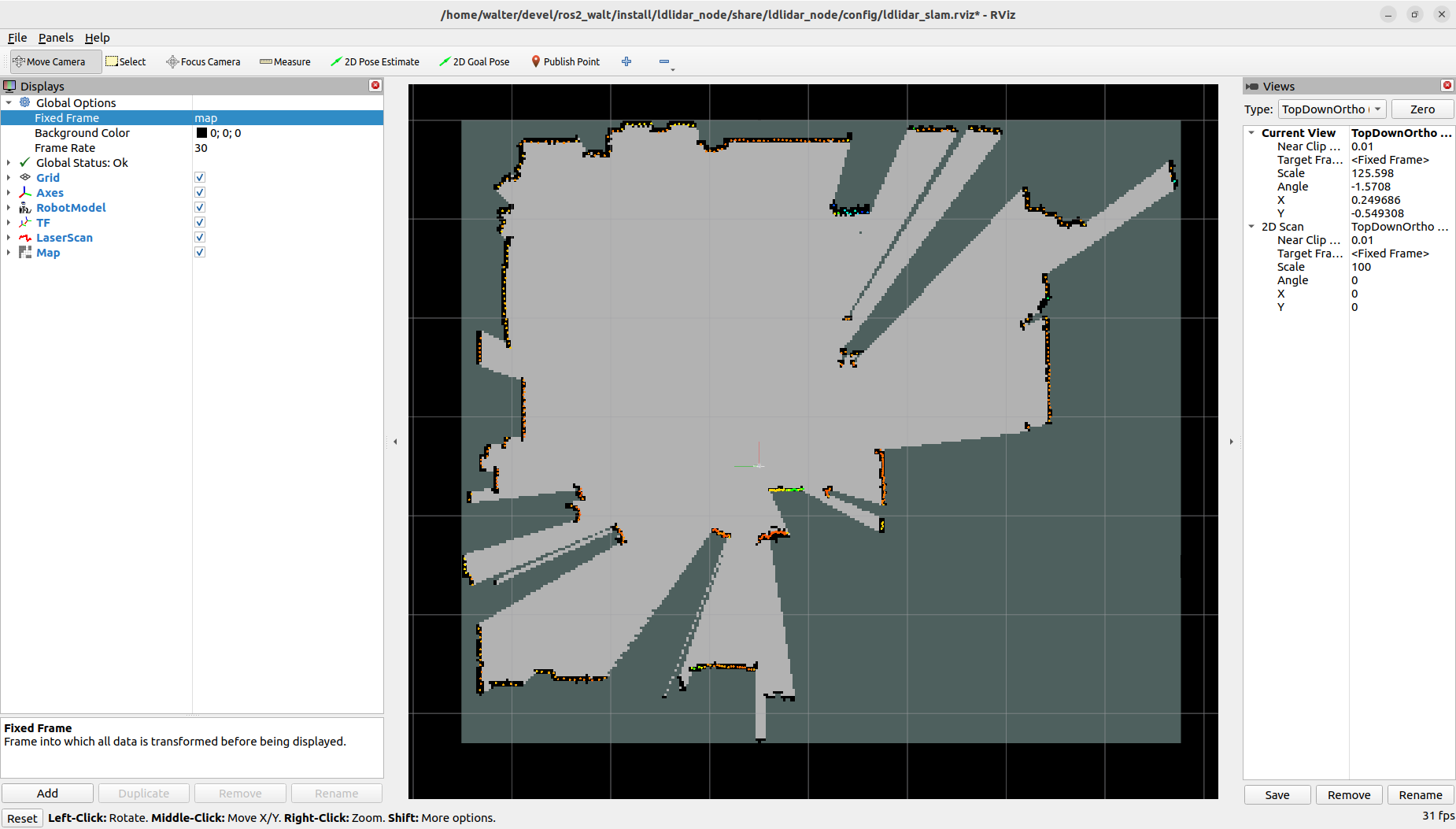
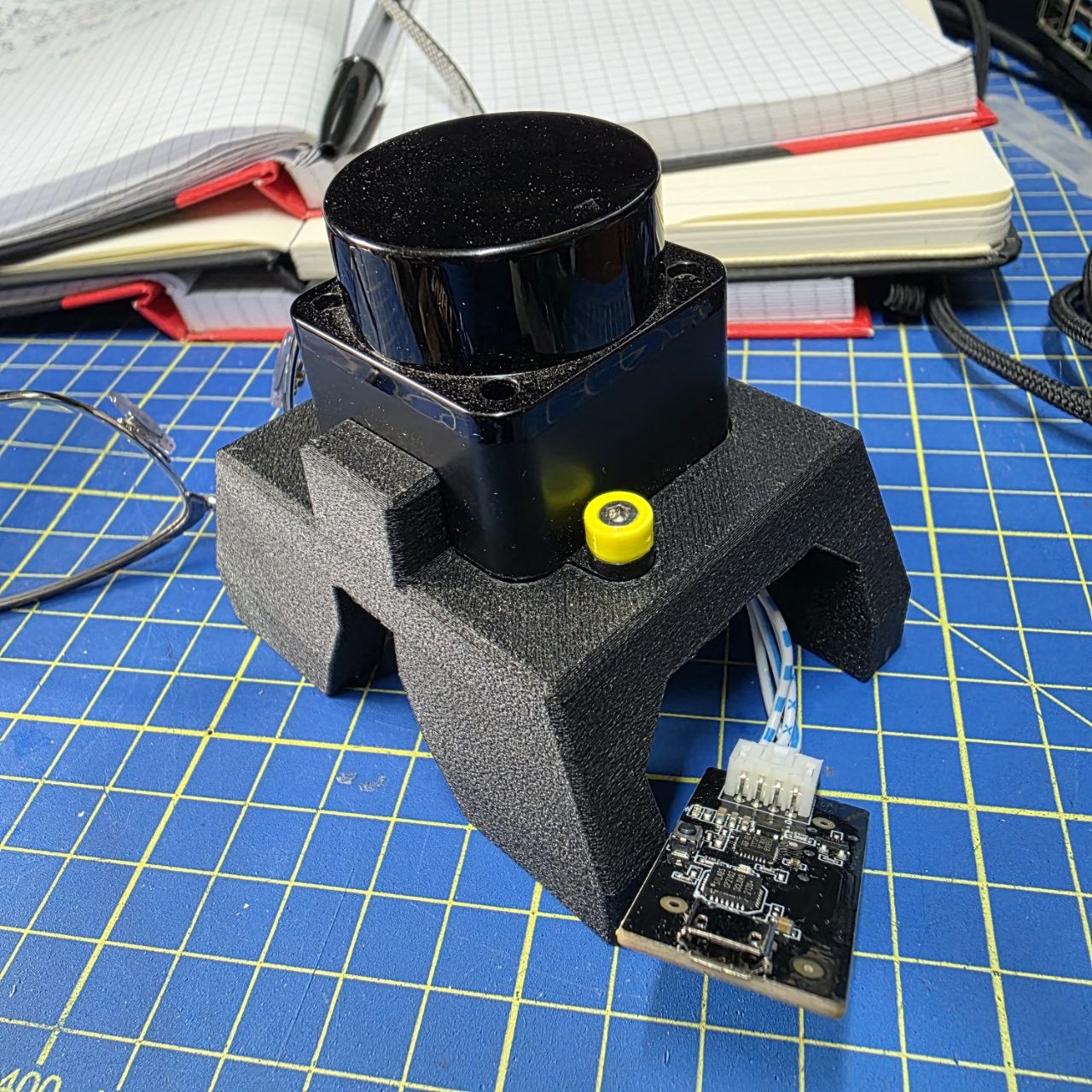
The first project page covers the LD Lidar ROS 2 Driver — a driver I originally wrote because no ROS 2 support existed for the LDRobot LD19 lidar I backed on Kickstarter. What started as a weekend effort to get a /scan topic publishing grew into a full driver: Nav2 Lifecycle nodes, SLAM Toolbox integration, a custom-modelled URDF, udev rules, benchmarking tools, and launch files for every use case. It supports the LD19 and LD06 sensors on ROS 2 Humble and Jazzy.
More ROS 2 project pages are on the way. Stay tuned!
Happy robotics programming! 🤖